Идея конструкции не нова, здесь просто собраны вместе как сама идея, так и ее реализация из простых и доступных материалов.
1. Описание
Эта игрушка движется вперед при помощи двух моторов. Как только один из ее усов касается препятствия, мотор со стороны этого уса начинает вращаться в обратную сторону и жук поворачивает до тех пор, пока не объедет препятствие.
Конструкция наглядно показывает принцип действия контактных датчиков.
На видео показано как все происходит
Подробное описание в ЛАБОРАТОРИИ УВЛЕЧЕНИЙ
2. Схема
В конструкции применены две батарейки AA, два мотора от детских игрушек, два контактных датчика.
Когда ни один из датчиков не нажат, к обоим моторам подается "+" от одной батарейки.
При нажатии на контактный датчик на мотор, к которому он подключен начинает поступать "-" от другой батареи и мотор вращается в противоположную сторону.

3. Сборка
Для начала сделаем эскиз расположения элементов робота на его корпусе.
После чего нарисуем контур самого корпуса (шаблон) и распечатаем все это на листе бумаги.

Теперь можно приступать у сборке.
Вот основные детали, которые нам потребуются

- Банка из-под растворимого кофе
- Контейнер для двух батарей AA
- Моторчики от детских игрушек (2 шт.)
- Контактные датчики (концевые выключатели - 2 щт.)
- Колесико от старой компьютерной мыши (можно заменить на какое угодно другое)
- Обжимные клеммы (такие часто применяют в автомобилях или бытовой электронике)
Кроме того я использовал термоусадочную трубку большого (22 мм) и малого (5 мм) диаметра и крепежные винты с гайками M2.
5.

Берем лист с шаблоном корпуса

и вырезаем шаблон

накладываем шаблон на банку и определяем какой ширины полосу жести от банки надо отрезать

что потом и делаем.
ВНИМАНИЕ! Работа с жестью опасна тем, что можно легко порезаться об острые зазубренные края в месте среза. Будьте осторожны!

Далее накладываем шаблон на вырезанную жесть и вырезаем по шаблону заготовку корпуса.

В итоге получается такой вот симпатичный "человечек"

его "ноги" - на самом деле кронштейны для крепления "мышиного колеса", поэтому мы их отгибаем вниз вдоль корпуса плоскогубцами

и сверлим отверстие для оси этого колеса

далее сверлим отверстия для крепления батарейного отсека (кстати в жести отверстия можно просто прокалывать шилом)

Крепим контейнер винтами и вставляем колесо

теперь размечаем отверстия для крепления датчиков

и устанавливаем их временно для того чтобы понять - не ошиблись ли мы с размерами.

Теперь пайка. Припаиваем проводники к моторам.

рекомендуем использовать разноцветные проводники и припаивать проводники одинакового цвета к одинаково расположенным выводам деталей, что облегчит окончательное подключение всего.

Так как на нашей схеме между батареями включен средний провод, подсоединяем его к контейнеру, продевая провод через отверстие контейнера со стороны, обратной той, из которой выходят плюсовой и минусовой провода и прикручиваем зачищенную часть нового проводника к пружинке, соединяющей выводы батареек.

припаиваем проводники к датчикам

Теперь собираем все электрические компоненты схемы и проверяем правильно ли вращаются моторы. Если нет - меняем полярность их подключения.

Крепим моторы к корпусу. Для этого нам потребуются два отрезка толстой термоусадочной трубки длиной примерно 1 см.


кладем мотор сверху на выступ корпуса, надеваем на мотор и выступ колечко термоусадки и нагреваем все это (строительным феном, зажигалкой или кожухом вокруг жала паяльника)

после крепления обоих моторов берем тонкую термоусадочную трубку, надеваем на вал моторчика и усаживаем. Это нужно для того чтобы вал моторчика не царапал поверхность, по которой будет ездить и для увеличения скорости жука. Мы эту трубку надевали в два слоя для более высокой скорости.

лишний кусок трубки отрезаем кусачками

и теперь изолируем термоусадкой все наши электрические соединения.

Займемся "усами" жука, которыми он должен ощупывать пространство впереди себя. Они будут крепиться к датчикам с помощью обжимных клемм

а сами усы сделаем из электромонтажного одножильного провода сечением 1,5 кв. мм

придаем усам нужную, "гусарскую" форму и делаем колечки на концах чтобы ничего не царапать

и обжимаем усы в гнезде клемм

после чего сами клеммы насаживаем на чувствительную пластину датчиков и плотно прижимаем плоскогубцами

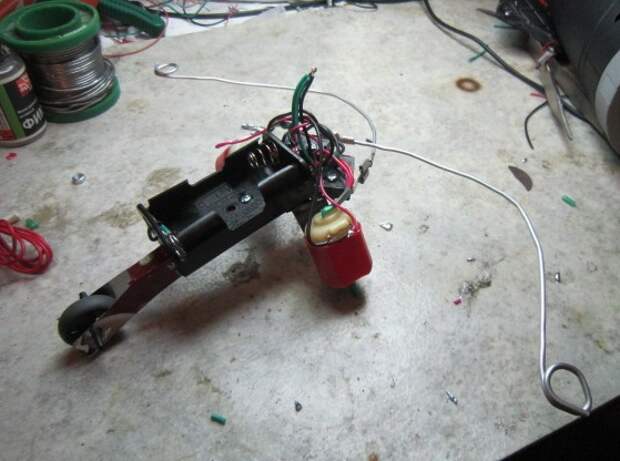
вот так устрашающе выглядят эти усы в собранном виде. моторы надо отогнуть вниз так, чтобы жук опирался на их оси как на ноги. Чем больше угол, на который вы их отгибаете, тем меньше скорость будет у Вашего жука

и вот, собственно наш жук в готовом виде


Что еще можно с нашим жуком сделать:
- Придумать ему симпатичный корпус, с которым он будет более похож на настоящего жука
- Сделать лабиринт из коробок, досок и других материалов и провести соревнования между несколькими такими жуками - кто из них первый найдет выход
- Заменить датчики касания на бесконтактные оптические датчики, что позволит жуку обходить препятствия не касаясь их или двигаться по линии, нарисованной на полу
Все это мы и будем делать на занятиях по началам робототехники в нашем клубе этой осенью.
Еще проекты
Система автоматического полива огорода за полчаса.
Самодельный электронный жук на солнечной батарее
Электровелосипед (электротрайк) своими руками
Электросамокат из подручных материалов
Автономное освещение дачного туалета, сарая, подсобки - за 5 минут!
Модель комнатной теплицы, управляемой компьютером
Анимированная картина "Ретро автомобиль"
и др.
Свежие комментарии